
|
Détails sur le produit:
|
| Poids: | 507g | ||
|---|---|---|---|
| Mettre en évidence: | Pince molle souple de robotique,pince molle de robotique de la charge 1920g,pince molle de robot de la charge 1920g |
||
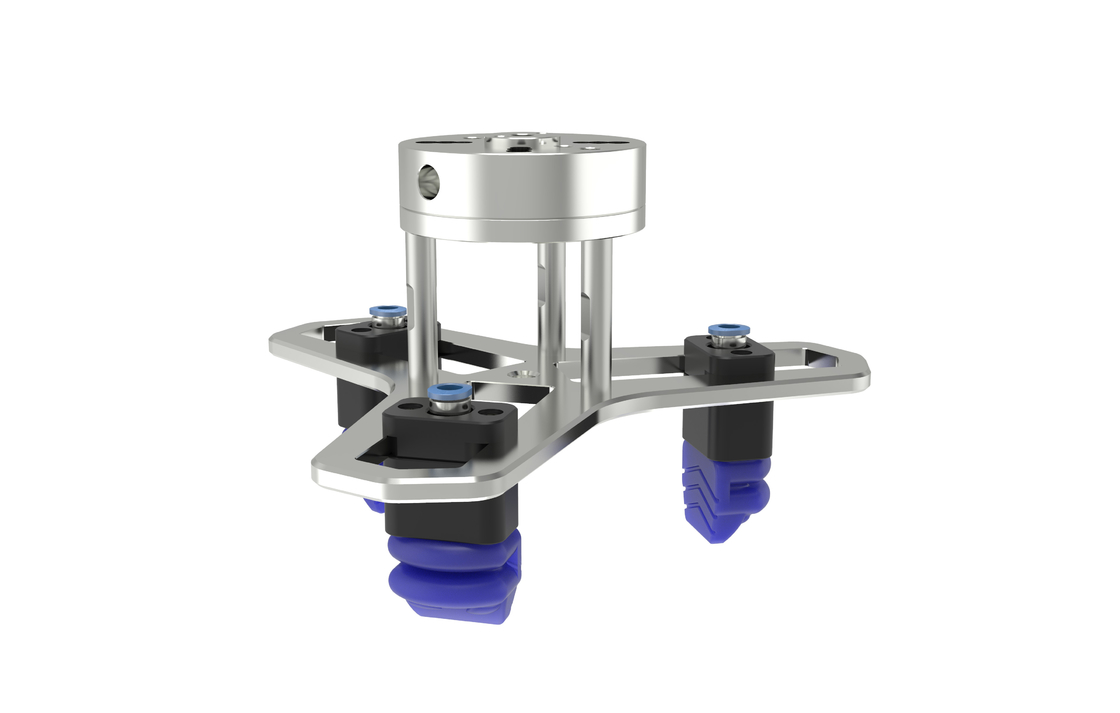
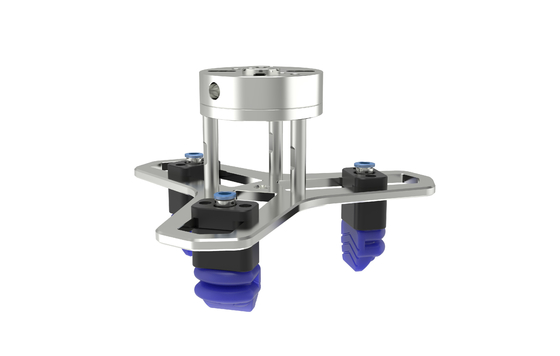
SFG-FNC3-N3025 + polyvalence + pince molle de robot
Pince molle de robot utilisant des particules pour transférer des forces
La plupart des déclencheurs flexibles conventionnels sont conduits par pression pneumatique ou hydraulique et exigent le hermeticity et une grande pompe d'entraînement. Pendant la prise, on s'attend à ce que souvent la rigidité de pince augmente avec la déformation accrue, il est difficile réaliser que pour les déclencheurs conventionnels. Ce document présente un déclencheur de doux-corps qui emploie des particules pour conduire les pinces, aucun cachetage est exigé et le déclencheur peut être conduit pour se plier utilisant seulement un piston pour pousser les particules. Dans les expériences, quand le volume de particules injectées changées de 1,0 fois le volume initial du déclencheur en 1,8 fois le volume initial, le déclencheur plié à 60° avec une augmentation presque de 7 fois de la rigidité comparée à l'état initial. Pour vérifier la faisabilité de cette méthode, une pince de doux-corps se composant de trois déclencheurs de doux-corps a été développée. Cette méthode fournit une alternative importante pour la conception et le développement des pinces flexibles.
| φb | 200 |
| Wn | 30 |
| DN | 31-142 |
| Livre | 68,2 |
| Lt | 62,7 |
| Ln | 44 |
| L | 25 |
| Smax | 6 |
| Ymax | 10 |
| gamme de dimension d'objet | 31-154 |
| charge (g) | 1920 |
| poids de produit (g) | 507 |
| pression d'utilisation maximum | 100kPa |
| durée de vie du produit | 300w |
![]()
Personne à contacter: Miss. wang
Téléphone: +8618651125686