
|
Détails sur le produit:
|
| Poids: | 158.1g | Application: | Industrie automobile, foodindustry, 3C, médical |
|---|---|---|---|
| Mettre en évidence: | Doigt robotique mou modulaire,doigt robotique mou de l'industrie 3C,doigt de robot de l'industrie 3C |
||
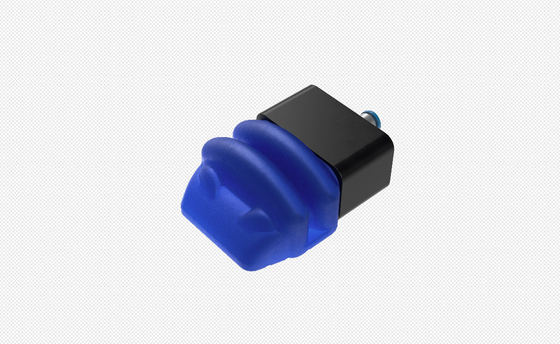
N6047 + conception modulaire + doigts mous de robot
Doigts mous de robot pour l'usage dans divers produits de gabarit
De nos jours la plupart des produits de téléphone portable emploient les caisses polies en métal pour augmenter le classiness du produit. Les pinces traditionnelles peuvent facilement laisser des défauts sur le cas du téléphone, causant le produit d'être ferraillé.
Le SRT utilise un doigt mou de robot pour saisir et fixer l'encadrement de téléphone portable, qui est une solution parfaite à ce problème. En même temps, le doigt mou de robot adopte une conception modulaire, et peut donc être parfaitement intégré dans de divers produits de fusion pour accomplir de diverses tâches passionnantes flexibles.
| W/mm | 60 | |
| L/mm | 47 | |
| Ln/mm | 77,7 | |
| T/mm | 35,2 | |
| X/mm | 0 | |
| A/mm | 53,5 | |
| B/mm | 30,5 | |
| Smax/mm | 18 | |
| Ymax/mm | 24 | |
| weight/g | 158,1 | |
| bout du doigt thrust/N | 26 | |
| coefficient de charge de différent finger/g | verticale | 750 |
| paquet | 1600 | |
| vitesse fonctionnante/CPM | <110> | |
| durée de vie du produit/accès | >300W | |
| pression d'utilisation | -60~100kPa | |
| Diamètre de connexion | 6mm | |
![]()
Personne à contacter: Miss. wang
Téléphone: +8618651125686