SFG-FNC3-N5041 + contrôlabilité + pince molle de robot
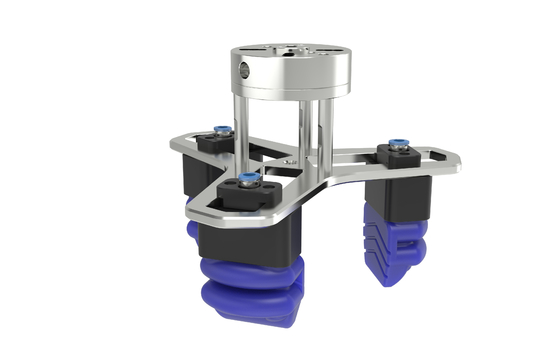
Pince molle de robot qui peut saisir des douzaines d'objets de différentes formes et tailles
Le point culminant de la conception des doigts mous de robot est la paume mobile (peu de chercheurs ont conçu la paume de la pince pour être mobiles). Dans le papier, les chercheurs prouvent qu'avec la paume mobile, le doigt mou de robot peut saisir des douzaines d'objets de différentes formes et tailles et jusqu'à un poids maximum de 3 kilogrammes, utilisant seulement le contrôle passionnant de boucle ouverte. En outre, la pince flexible a l'excellente stabilité passionnante, avec des objets demeurant fermement saisis sans tomber quand le bras robotique se déplace à une accélération de 15m/s^2.
| φb | 200 |
| Wn | 50 |
| DN | 28-134 |
| Livre | 68,2 |
| Lt | 62,7 |
| Ln | 66 |
| L | 40,5 |
| Smax | 12 |
| Ymax | 17 |
| gamme de dimension d'objet | 28-158 |
| charge (g) | 3600 |
| poids de produit (g) | 633 |
| pression d'utilisation maximum | 100kPa |
| durée de vie du produit | 300w |
![]()
Nos produits sont vendus dans le monde entier. Vous pouvez être assuré de l'ensemble du processus de nos produits.